��Ա��½��
�Լ�������һ��������
������3����H�ŵ�·
����
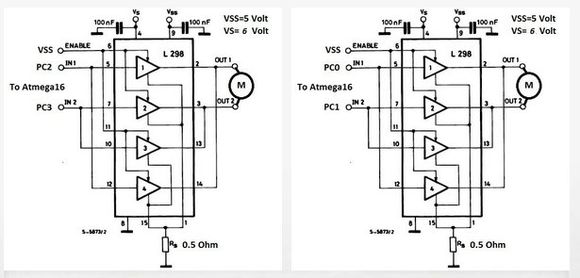
��������L298�Ƴɵ�˫H������������ʾ����ͼ�������6V��2.4A�����У�L298�����������������������ֲᡣ
����
����
����
����
����
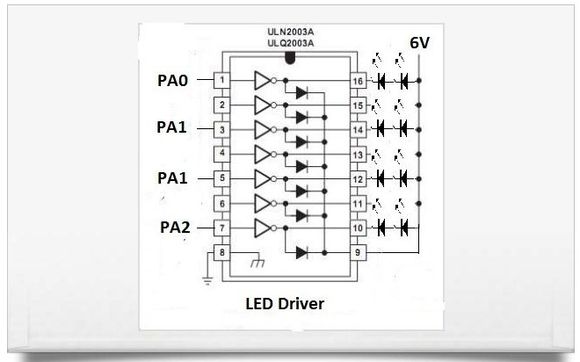
������4����LED����
����
����ULN2003���ֶٹ�������һ���ϼ�����LED�ķ��������ṩ��7���������·��ͼ�������ֲ����¡�
����
����
����
������5������Ƭ����·
����
����Դ����ĵ���ƽ̨��ATMEL AVR studio 4ʹ��AVR MKII ISP��������д������Ҫ��
����
����

����
����ʹ��Atmega16��Ƭ���Ĵ����������
������PC����ƽ���Ϸ���ASCII��
���������յ���ASCII��ת�����ض�����Ϣ������˿�A�Ͷ˿�C
������ͼ��ʾ��16Mhz�ⲿƵ��г�������۶�λ��Ҫ���óɣ���λ0xc9����λ0xff��
����
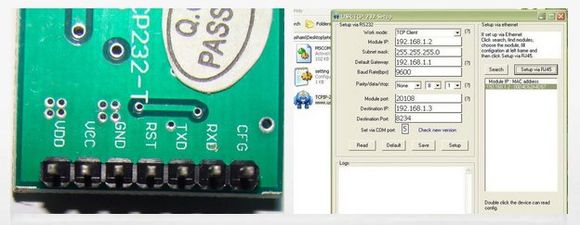
������6������̫��-����ת����
����
�����Ҵ�������ַ�õ���ת��ģ�顣
����
����
����
�������߷�����
����
����VDD��5V��Դ
����GND�ӵ�
����RX��Atmega16��TX
����TX��Atmega16��RX
����CFG �ӵ�������ʱ������ͨģʽ���ӵ�������ʱ��������ģʽ
����Ҫ�������ģ��RS232-TTL��ƽת��ģ��Ҳ���б�Ҫ�ġ�����Դ�������ַ���ص������ĵ���
����
�����������Ŀ�У��ҽ�ת�����������£�
����
��������ģʽ��TCP/IP����
����ģ��IP ��192.168.1.2
�����������룺255.255.255.0
����Ĭ�����أ�192.168.1.1�������IP��
������żУ��λ/����λ/ֹͣλ����/8/1
����Ŀ��IP ��192.168.1.3��ƽ���IP��ַ��
����Ŀ�Ķ˿ڣ�8234
���������� ��9600����
����Ķ�
��ҵ�ȵ� TOP10
.more

�������
�л�������������Ϣ����Ӫ����֤ ��ICP��13026071��
Copyright 2010 www.ckia.org inc.all rights reserved. ��Ȩ����
Copyright 2010 www.ckia.org inc.all rights reserved. ��Ȩ����
